O novo papel dos sistemas GNSS seguros e de alta precisão no mercado automóvel
Os Sistemas Globais de Navegação por Satélite (GNSS), especialmente o norte-americano GPS e o europeu Galileo, conciliam uma tecnologia que está completamente integrada nas nossas atividades do dia-a-dia. Encontramo-la nos nossos veículos, telemóveis, wearables e dispositivos em geral, e assimilámos por completo conhecer a nossa localização em cada momento e lugar.
Um dos usos mais difundidos do GNSS é a navegação porta a porta. Reconheço que o autor que subscreve este texto por vezes se irrita quando repara que, nas ruas, em programas de televisão, telejornais, jornais, etc. se chama continuamente “GPS” às aplicações de navegação. A realidade é que o termo GPS (que nem sequer é suficientemente rigoroso, uma vez que se deveria utilizar GNSS, ao existirem outros sistemas como Galileo, BeiDou, Glonass, etc.) se refere à tecnologia que permite ao dispositivo conhecer a sua posição, velocidade e curso atuais. Como navegar pelas ruas e estradas até chegar ao endereço de destino é consequência dos mapas e algoritmos de cálculo de percursos que se encontram dentro dos dispositivos ou aplicações de navegação, não da posição GNSS (embora um não pudesse existir sem o outro).
Certamente influenciados por esta sinédoque, e abordando já o tema do mercado automóvel que nos ocupa, existe ainda no mesmo uma visão tradicional que associa os sistemas GNSS à área multimédia dos veículos (onde habitualmente se incluem os sistemas de navegação). Para estas aplicações clássicas dos sistemas GNSS (onde também se podem enquadrar os sistemas de chamadas de emergência)´, basta o GNSS por si só, que pode atingir precisões em torno dos 5-10 m para monofrequência ou de 3-5 m para multifrequência. Especialmente tendo em conta que essa precisão pode até ser melhorada para 1-3 m mediante sistemas de aumento como DGNSS ou SBAS.
No entanto, estes níveis de precisão, por muito bons que sejam, não são suficientes para cobrir os requisitos mais exigentes das aplicações emergentes no campo dos sistemas cooperativos ou da condução autónoma. Neste mundo, os sistemas utilizados precisam de incrementar progressivamente a disponibilidade da função de localização global e os níveis referidos de precisão. É aqui que os sistemas GNSS de alta precisão (PPP, RTK, PPP-RTK) aparecem, uma vez que, com eles, podemos obter uma precisão de nível centimétrico, o que, complementado com outros sensores locais como radar, câmaras ou LiDAR, cumpre o papel de posicionar o veículo de maneira precisa.
Em qualquer caso, nas aplicações em que o conceito de safety é chave, como é o caso da condução autónoma, os nossos sistemas devem ir mais além da precisão. De pouco adianta ter posições precisas se não tivermos forma de saber se a posição que introduzimos como entrada num sistema de segurança está errada. O valor acrescentado destes sistemas de posicionamento seguro é que proporcionam uma posição “segura”, o que significa uma posição precisa e fiável. Para isso, estes sistemas implementam o conceito de integridade associado à posição, graças à deteção e exclusão, em tempo real e durante o cálculo da posição, das fontes de erro que afetam a mesma. Graças a isso somos capazes de calcular uma área de confiança, conhecida como protection level. A probabilidade de que a posição real (posição calculada menos o erro) se encontre fora da área de confiança que circunda a posição calculada é extremamente baixa e abaixo da probabilidade objetivo (conhecida como Target Integrity Risk ou TIR). Quanto menor for o TIR objetivo, maior será o protection level, uma vez que haverá mais considerações a ter em conta no momento de delimitar o erro.
Para além da área de confiança ou protection level, o cumprimento de padrões como ISO 26262 ou ISO 21448 (SOTIF) no desenvolvimento dos referidos sistemas e o conceito de integridade permitem ao sistema alcançar um nível de ASIL (Automotive Safety Integrity Level) adequado e integrar o componente GNSS com outros subsistemas ASIL, com o objetivo de contribuir para o safey case do veículo.

Em qualquer caso, e tal como já adiantámos, o GNSS faz sentido em condução autónoma quando, para além disso, é combinado com outros sensores. Por si só, o GNSS não pode ser utilizado para guiar um veículo autónomo (mesmo sem ter em conta os elementos externos como obstáculos, outros veículos, etc.), uma vez que, como sabemos, o sistema tem as suas limitações, especialmente em áreas com escassa visibilidade do céu como podem ser contextos urbanos ou túneis. Nestes casos, a integração com a informação que provém de outros sensores como inerciais, odómetros, etc., permitem continuar com a função de localização mediante uma projeção da última posição GNSS conhecida durante um breve período de tempo. Se pensarmos, para além disso, em como funcionam os carros autónomos, veremos que existem inúmeros sensores a bordo, como câmaras, radares e LiDAR, que implementam o papel do olho humano conformando o sistema de perceção do veículo. Juntamente com a inteligência artificial, a perceção proporciona ao veículo o conhecimento do seu contexto e obstáculos, tanto estáticos como dinâmicos, esperados e inesperados. Em conjunto, o sistema de perceção, a IA e o sistema de posicionamento global que, para além disso, proporciona velocidade e rumo do veículo, dando conformidade aos componentes ADAS cruciais da condução autónoma.
Neste conjunto, a solução GNSS de alta precisão e segura apresenta independência, em termos de arquitetura, relativamente aos sensores de perceção e aos mapas. De acordo com a ISO 26262-9 sobre functional safety, a combinação de subsistemas independentes com um nível mais baixo de ASIL (ASIL-B) pode, mediante a implementação de redundância, atingir um nível ASIL mais alto (por exemplo, ASIL-D). Como resultado, utilizando um sistema GNSS seguro, que pode atingir níveis ASIL-B, como uma peça adicional do safety case do veículo, o OEM pode alcançar os níveis mais altos de ASIL requeridos. Isto ganha especial importância se, para além disso, considerarmos que o GNSS é um sensor com um custo contido e que pode trabalhar em contextos muito diversos sob todo o tipo de condições climatéricas, incluindo as situações sem referências visuais que afetam outros sistemas ADAS, como possam ser desertos, calçadas cobertas de neve, etc.
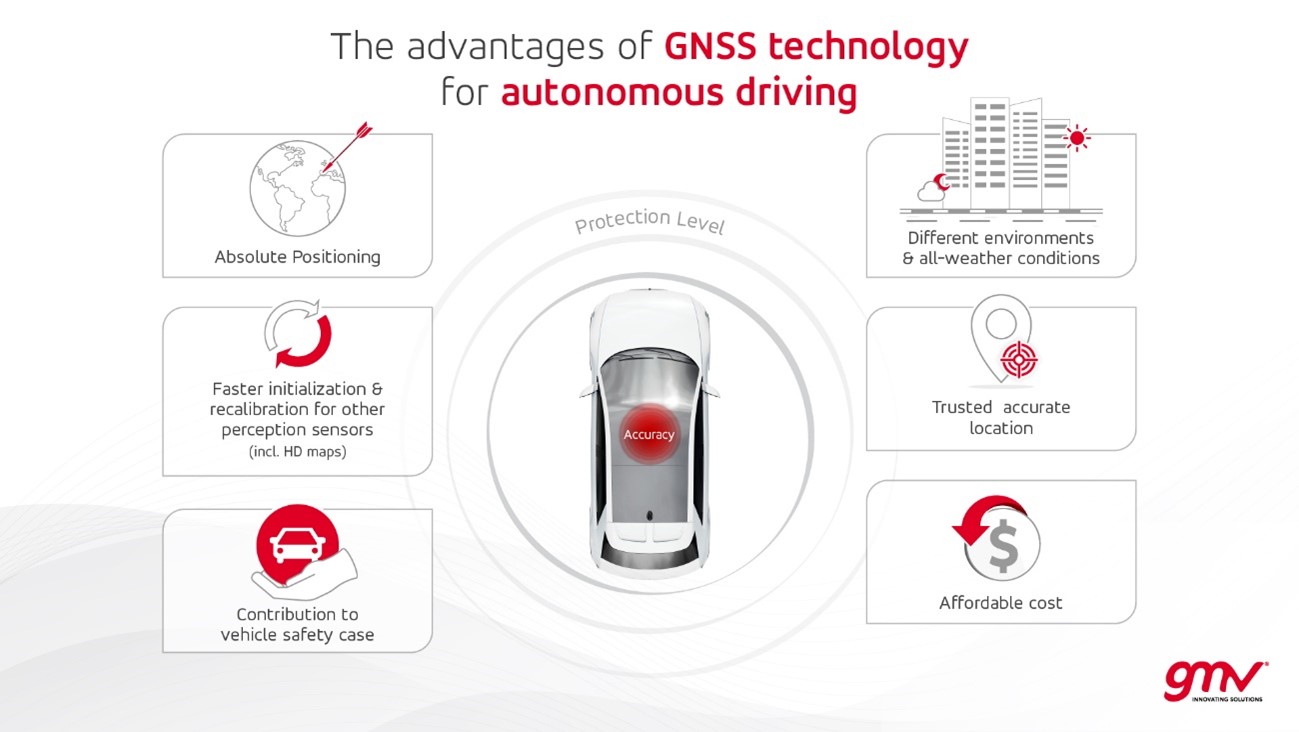
Para além da sua contribuição para o safety case, o sistema GNSS também pode ser utilizado para inicializar e calibrar outros sensores de perceção, apoiando um uso mais eficiente dos recursos da plataforma. Também representa uma fonte fiável para a atualização dinâmica de mapas HD (por exemplo, mediante técnicas SLAM ou outras). Da mesma forma, a combinação de uma posição precisa juntamente com o protection level que comentámos anteriormente pode ser chave para determinar de maneira unívoca os eventos de entrada ou saída dentro de uma determinada área geográfica (geofencing). Isto é particularmente relevante em condução autónoma para se assegurar de que o veículo acedeu a alguma infraestrutura (por exemplo, uma via rápida) onde se permite um nível maior de automatização. Em resumo, o número de aplicações para uma posição precisa e fiável aumenta por momentos.
A maioria dos OEM já começou a descobrir os benefícios que soluções como o Point Safe® for Automotive, fornecido pela u-blox e que integra o produto GMV GSharp® for Automotive, podem fornecer para todos os casos de uso que abordámos neste texto. De momento, esta tecnologia está a ser introduzida pouco a pouco em modelos específicos, de maneira análoga a outras funções de condução autónoma, mas espera-se que o mercado para este tipo de soluções cresça consideravelmente nos próximos anos.
Os sistemas GNSS (Global Navigation Satellite System) ainda têm, portanto, um longo caminho a percorrer no setor automóvel.
Autor: Carlos Busnadiego Gutiérrez