Finaliza o projeto de robótica europeu PRO-ACT
No final de abril e depois de 27 meses de intenso trabalho (14 deles com condições COVID e as suas correspondentes limitações), o projeto PRO-ACT chegou ao fim.
Iniciado em 2019, PRO-ACT foi um dos 5 projetos selecionados para serem financiados pela Comissão Europeia na segunda fase do Strategic Research Cluster (SRC) em robótica espacial, no âmbito do programa europeu H2020. Com a sua longa experiência no campo da robótica espacial, a GMV teve uma participação destacada neste projeto, liderado por SpaceApps e desenvolvido por um consórcio formado por 10 sócios. PRO-ACT tem como principal objetivo desenvolver e validar aplicações para facilitar e dar suporte à preparação de futuras missões tripuladas a outros planetas. Para conseguir este ambicioso objetivo, os robôs devem ser capazes de operar coordenadamente de forma autónoma em equipa para realizar tarefas complexas, como mapear de forma colaborativa e preparar o terreno da futura base ou construir infraestruturas de forma cooperativa para o assentamento humano. Outro objetivo de PRO-ACT era abordar o problema do estabelecimento de um precursor de base lunar mediante a ensamblagem de um sistema de extração e utilização de recursos in situ (ISRU), com a ajuda de robôs móveis agindo cooperativamente, capacidades essas que são essenciais para o estabelecimento de futuros assentamentos humanos. No âmbito deste projeto utilizaram-se todos os blocos comuns (OG1-5) desenvolvidos durante a primeira fase do programa (Building Blocks), fazendo especial menção a ERGO (controlador autónomo orientado para a implementação e execução de objetivos de alto nível) e ESROCOS (contexto de desenvolvimento de software para aplicações de controlo robótico), ambos liderados pela GMV na primeira fase do cluster. A GMV liderou também a definição, o desenho e a implementação da arquitetura multi-robô relacionada com a planificação, execução-coordenada e monitorização, participando no desenvolvimento de outros sistemas de suporte (comunicações, centro de controlo e monitorização em terra), na integração dos blocos comuns desenvolvidos durante a primeira fase e em atividades de prova, na demonstração e difusão dos resultados obtidos. Devido aos regulamentos sanitários e às restrições de viagem por toda a Europa, a demonstração final das soluções desenvolvidas no âmbito deste projeto realizaram-se maioritariamente de maneira remota, ajustando cada um dos cenários inicialmente previstos de demonstração a duas áreas de teste diferentes: a Sala Lunar Interior de DFKI (Alemanha) onde estava o robô “Mantis” e no PIAP-Space (Polónia) onde estava o robô “Veles”.
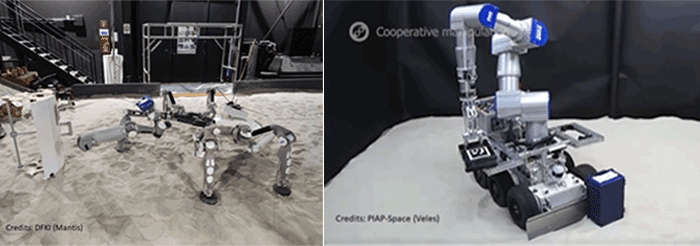
Após estabelecer e configurar uma rede virtual (VPN, Virtual Private Network) entre ambas as localizações e os diferentes sócios, o software foi instalado de forma remota e configurado em ambos os robôs com o fim de validar e demonstrar o correto envio, planificação e execução de «cooperative goals» comandados remotamente a partir de uma estação multi-robô de controlo e executando-se a partir da GMV em Espanha. Durante os teste remotos, os robôs Mantis e Veles exploraram, simultaneamente e de forma autónoma, o seu terreno lunar análogo, cartografando o contexto de forma cooperativa e simularam tarefas cooperativas de manipulação e transporte de objetos apoiados por estações de controlo multi-robô da GMV (Espanha) e Space Applications Services (Bélgica), validando assim satisfatoriamente o «Cooperative and multi-robot framework» desenvolvido durante este projeto.
Após estas provas, no dia 26 de maio teve lugar, de maneira também remota, a aceitação final do projeto, um marco em que estiveram presentes membros da Comissão Europeia (CE) e a Agência Espacial Europeia (ESA), juntamente com o resto do consórcio de sócios de PRO-ACT. Após mostrar os resultados obtidos (apresentações, vídeos e fotos) dos testes de demonstração executados no final de maio e os resultados finais do projeto, tanto a CE como a ESA felicitaram o consórcio pelos resultados obtidos neste ambicioso projeto, agradecendo o grande trabalho realizado tecnicamente e destacando a coordenação, adaptação e colaboração extra de todo o consórcio devido ao COVID.