Gdy roboty uczą się mówić tym samym językiem: nowa era interoperacyjności przemysłowej

Przez lata robotyka przemysłowa ewoluowała w zamkniętych środowiskach: każdy producent opracował własne języki, architektury i protokoły sterowania. Takie podejście, choć pozwoliło na znaczne postępy w automatyzacji, wygenerowało strukturalny problem — fragmentację — która ogranicza skalowalność i utrudnia integrację heterogenicznego sprzętu w tym samym zakładzie lub na linii produkcyjnej.
Dziś się to zmienia. Robotyka nie jest już obietnicą, ale niezbędnym elementem codziennych działalności w fabrykach, środowiskach logistycznych lub obiektach energetycznych. Jednak przyspieszony rozwój robotów i pojazdów autonomicznych przyniósł ze sobą nowe wyzwanie: interoperacyjność.
W systemie, w którym współistnieją urządzenia różnych producentów, każde z własnym oprogramowaniem, interfejsem i systemem komunikacji, firmy stają w obliczu rosnącej złożoności w koordynowaniu zadań, wymianie danych lub zapewnianiu bezpieczeństwa operacyjnego. Brak wspólnego języka między robotami pochodzącymi od różnych dostawców oznacza konieczność wdrażania rozwiązań częściowych lub zależnych od dostawcy, co wiąże się z wysokimi kosztami integracji i utrzymania.
W kierunku wspólnego języka robotów
Dojrzałość sektora dynamizuje konsolidację otwartych standardów, które wspierają współpracę między systemami. Ramy takie jak Open-RMF, zainicjowane przez Open Source Robotics Foundation, lub VDA5050, opracowane przez Niemieckie Stowarzyszenie Przemysłu Motoryzacyjnego, kładą podwaliny pod różne typy robotów do wymiany informacji, planowania wspólnych tras oraz wykonywania misji w skoordynowany i bezpieczny sposób.
Do tego dochodzi integracja 5G, która umożliwia prawdziwą konwergencję między światem IT i OT. To połączenie o niskim opóźnieniu i wysokiej niezawodności otwiera możliwość monitoringu i kontroli w czasie rzeczywistym, co jest niezbędne w środowiskach przemysłowych o krytycznym znaczeniu.
Inteligentna warstwa koordynacji
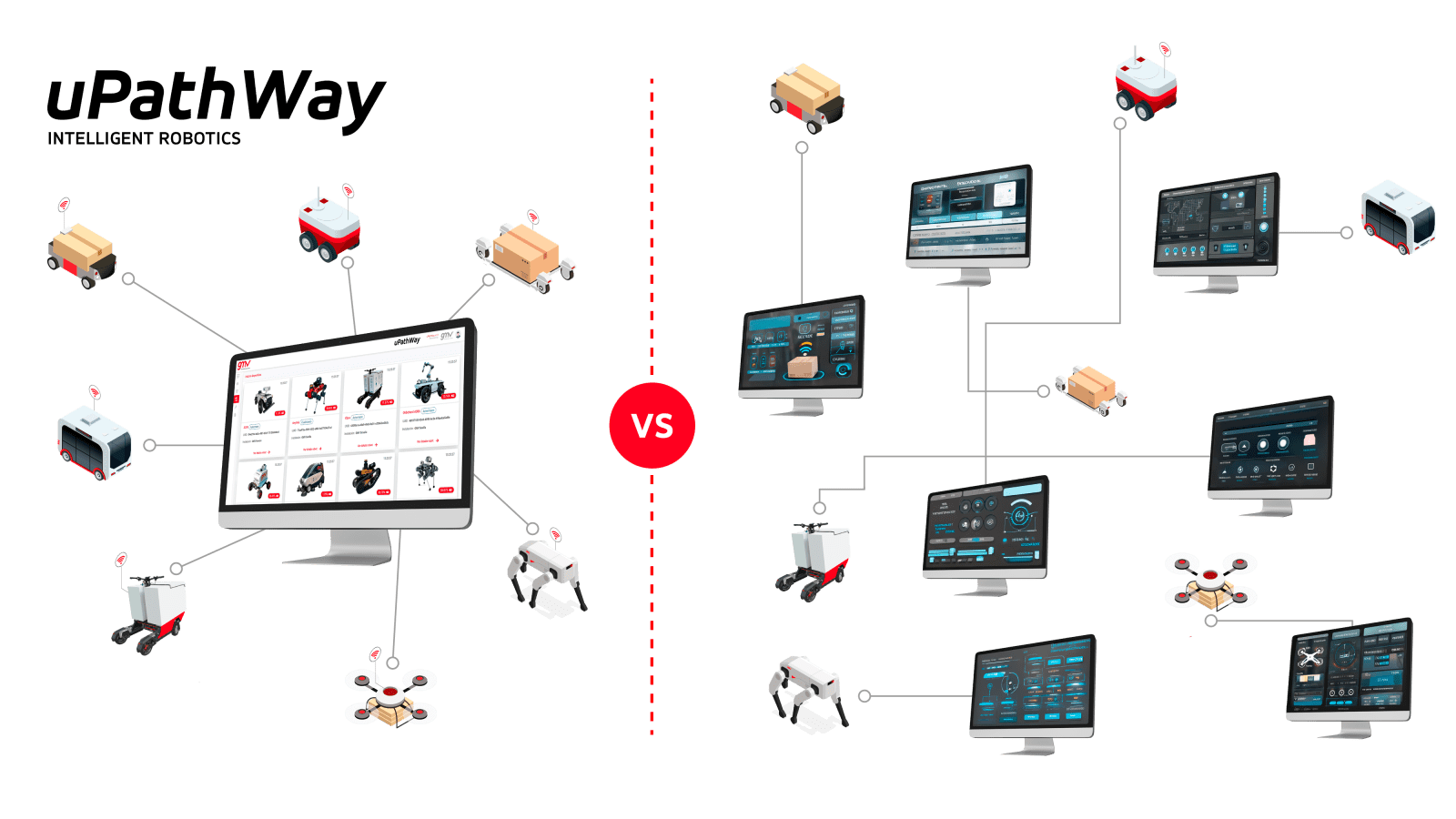
W tym kontekście pojawia się potrzeba stworzenia warstwy koordynacji, która działała jako pomost między technologiami, producentami i systemami. To właśnie w tym obszarze sprawdzają się rozwiązania takie jak uPathWay, oferujące podejście oparte na interoperacyjności robotów.
uPathWay umożliwia zarządzanie i monitorowanie flot mieszanych z poziomu jednej platformy, działając jako ujednolicone centrum integrujące roboty oraz pojazdy autonomiczne różnych producentów. Jego otwarta architektura ułatwia planowanie misji, koordynację zadań i zdalny monitoring za pomocą zaawansowanych narzędzi opartych na sztucznej inteligencji w celu optymalizacji tras, wykrywania anomalii lub analizowania wydajności w czasie rzeczywistym.

Roboty współpracujące ze sztuczną inteligencją — idealni towarzysze
Połączenie robotyki i sztucznej inteligencji zmienia nasz sposób myślenia o automatyzacji. Roboty nie wykonują już tylko powtarzalnych zadań: są teraz inteligentnymi agentami zdolnymi do współpracy, uczenia się na podstawie warunków otoczenia i autonomicznego działania w złożonych lub ryzykownych scenariuszach.
Od inspekcji instalacji fotowoltaicznych po monitorowanie platform morskich lub śledzenie linii produkcyjnych, interoperacyjność umożliwia wszystkim tym systemom pracować w skoordynowany, wydajny i bezpieczny sposób.
Jesteśmy zatem na etapie dojrzałości technologicznej, na którym robotyka nie jest już oceniana wyłącznie pod względem sprzętu, ale pod względem łączności, współpracy i współdzielonek inteligencji. Interoperacyjność będzie kluczem do uwolnienia jej pełnego potencjału i zbudowania prawdziwie autonomicznych oraz odpornych fabryk, zakładów i środowisk przemysłowych.
Autor(ka): Eric Polvorosa