Europejski projekt z zakresu robotyki PRO-ACT dobiega końca
Pod koniec kwietnia, po 27 miesiącach intensywnej pracy (14 z nich w warunkach naznaczonych trwającą pandemią COVID-19 i z wynikającymi z tego tytułu ograniczeniami), dobiegł końca projekt PRO-ACT.
Rozpoczęty w 2019 roku PRO-ACT był jednym z 5 projektów wybranych do finansowania przez Komisję Europejską w drugiej fazie klastra Strategic Research Cluster (SRC) w zakresie robotyki kosmicznej, w ramach europejskiego programu H2020. Dzięki wieloletniemu doświadczeniu w dziedzinie robotyki kosmicznej firma GMV miała wyjątkowy udział w tym projekcie, prowadzonym przez SpaceApps i realizowanym przez konsorcjum złożone z 10 partnerów.
Głównym celem PRO-ACT było opracowanie oraz walidacja aplikacji ułatwiających i wspierających przygotowywanie przyszłych misji załogowych na inne planety. Aby osiągnąć ten ambitny cel, roboty muszą być w stanie działać w sposób skoordynowany i autonomiczny, wykonując złożone zadania, takie jak wspólne mapowanie oraz przygotowywanie gruntu pod przyszłą bazę lub wspólne budowanie infrastruktur dla osiedli ludzkich. Innym celem projektu PRO-ACT było rozwiązanie problemu dotyczącego utworzenia pionierskiej bazy księżycowej poprzez instalację systemu wydobywania i wykorzystywania zasobów in situ (ISRU) przy pomocy współpracujących robotów mobilnych. Zdolności te mają zasadnicze znaczenie dla tworzenia przyszłych osiedli ludzkich.
W ramach tego projektu wykorzystano wszystkie wspólne moduły (OG1-5) opracowane w pierwszej fazie programu (Building Blocks), ze szczególnym uwzględnieniem ERGO (autonomicznego kontrolera służącego do wdrażania i realizacji celów nadrzędnych) oraz ESROCOS (środowiska programistycznego dla aplikacji do sterowania robotami). Firma GMV prowadziła oba te projekty w pierwszej fazie klastra.
Ponadto firma GMV pokierowała procesami definiowania, projektowania i wdrażania architektury wielorobotowej związanej z czynnościami planowania, koordynacji oraz monitorowania. Uczestniczyła również w rozwoju innych systemów wsparcia (łączności, naziemnego centrum kontroli i monitoringu), a także w procesie integracji wspólnych modułów opracowanych w pierwszej fazie oraz w testowaniu, demonstracji i następnie prezentacji uzyskanych wyników.
Ze względu na przepisy sanitarne oraz ograniczenia w podróżowaniu po Europie ostateczna demonstracja opracowanych w ramach tego projektu rozwiązań została przeprowadzona w dużej mierze zdalnie, z dostosowaniem każdego z pierwotnie planowanych scenariuszy demonstracyjnych do dwóch różnych obszarów testowych: Wewnętrznej Sali Księżycowej DFKI (Niemcy), z robotem „Mantis”, oraz przestrzeni w PIAP-Space (Polska), z robotem „Veles”.
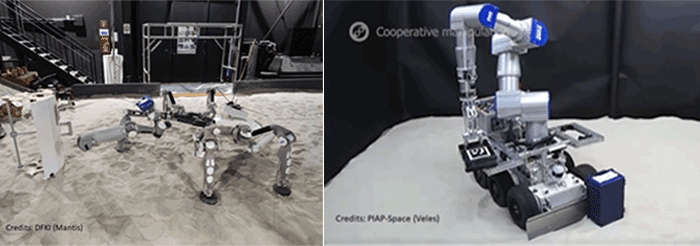
Po ustanowieniu i skonfigurowaniu połączenia sieci wirtualnej (VPN – Virtual Private Network) pomiędzy obiema lokalizacjami i poszczególnymi partnerami oprogramowanie zostało zdalnie zainstalowane oraz skonfigurowane na obu robotach – zdalnie sterowanych z wielorobotowej stacji kontrolnej kierowanej przez firmę GMV w Hiszpanii – w celu zwalidowania, a także demonstracji prawidłowego przekazu, planowania i realizacji „cooperative goals”. Podczas zdalnych testów roboty Mantis i Veles jednocześnie i w sposób autonomiczny badały swój analogowy teren imitujący powierzchnię księżyca, mapując wspólnie środowisko. Przeprowadziły również symulacje wspólnych zadań związanych z obsługą i transportem obiektów, ze wsparciem wielorobotowych stacji kontrolnych GMV (Hiszpania) i Space Applications Services (Belgia), co umożliwiło pomyślne zatwierdzenie opracowanego w ramach tego projektu „Cooperative and multi-robot framework”.
Po przeprowadzeniu tych testów, 26 maja miała miejsce ostateczna akceptacja projektu, która odbyła się również zdalnie. W tym stanowiącym prawdziwy kamień milowy wydarzeniu udział wzięli członkowie Komisji Europejskiej (KE) i Europejskiej Agencji Kosmicznej (ESA), wraz z resztą konsorcjum partnerskiego PRO-ACT. Po przedstawieniu wyników (prezentacje, filmy i zdjęcia) testów demonstracyjnych przeprowadzonych pod koniec maja, a także ostatecznych rezultatów projektu zarówno KE, jak i ESA pogratulowały konsorcjum uzyskanych w ramach tego ambitnego projektu wyników. Podziękowały mu za świetną pod względem technicznym pracę i nie omieszkały wspomnieć o dodatkowych działaniach z zakresu koordynacji, adaptacji i współpracy, jakie całe konsorcjum musiało podjąć w związku z pandemią COVID-19.