El software, la llave del vehículo del futuro

El mundo de la automoción está en continuo cambio y durante los últimos años se está focalizando principalmente en los vehículos conectados y autónomos.
Los vehículos están experimentando una gran evolución y cada día ofrecen nuevas funcionalidades, tienen una mayor complejidad y requieren mayores medidas de seguridad. Todo esto se consigue a través de la inclusión de nuevos servicios y funcionalidades SW. Ya algunos estudios han constatado que en la última década se ha multiplicado por más de 10 las líneas de código presentes en los vehículos.
El software está asumiendo cada vez más tareas importantes en el coche, facilitando el intercambio de datos con otros usuarios de la carretera y con la infraestructura, la actualización de los vehículos desde la nube y, de forma progresiva, la llegada de la conducción autónoma.
Este protagonismo cada vez mayor que está adquiriendo el software en el vehículo, con el incremento del número de líneas de código y de la complejidad asociada a las diferentes funciones del vehículo hace que se requiera una mayor potencia de cálculo e integración.
Esta evolución de los desarrollos SW está ocasionando que también se produzca una evolución y transformación en la arquitectura eléctrica y electrónica de los vehículos.
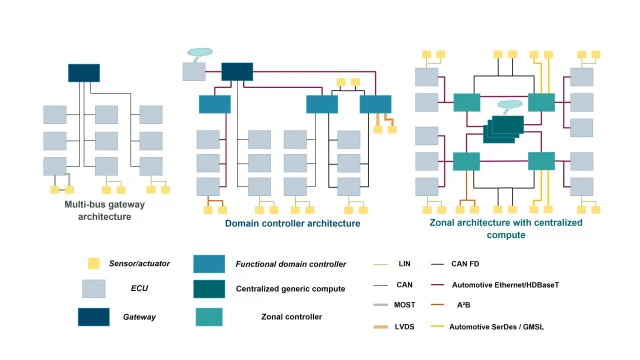
Esta comenzó siendo una arquitectura distribuida, en la que se disponía de una ECU (Electronic Control Unit) para cada servicio o funcionalidad, que se instalaba en el vehículo y se interconectaba con otras ECUs en caso de ser necesario, aunque en la mayoría de las situaciones la interacción entre ellas era escasa. Cada una de estas ECUs estaba compuesta por su propio HW y SW, con una arquitectura, en la mayoría de los casos, totalmente diferente y customizada para las diferentes plataformas disponibles. Esto ya no solo implicaba una gran complejidad y dificultad a la hora de mantener y resolver problemas en los vehículos, sino que también provocaba una gran dificultad a la hora de reutilizar muchos desarrollos SW entre diferentes vehículos o fabricantes.
Viendo que esta complejidad tendería a ser cada vez mayor, se empezó a llevar a cabo el estudio de arquitecturas alternativas, que han ido definiendo la evolución arquitectónica del automóvil. El primer paso fue crear redes específicas con aquellas ECUs que necesitaban comunicarse entre sí o que estaban dentro de funcionalidades específicas, constituyendo lo que se conoce como una arquitectura centralizada de dominios. Las ECUs de Dominio se conectan a las diferentes ECUs funcionales mediante el bus CAN y una conexión Ethernet. Esta arquitectura soporta funciones más complejas, tiene mayor flexibilidad y una red de comunicaciones de mayor velocidad.
De cara al futuro se está trabajando en la definición de arquitecturas por zonas, que puede solucionar los problemas de la arquitectura de dominio al agrupar ECUs que se encuentran físicamente cerca bajo un solo controlador de zona. Esta unidad actúa como maestro para procesar todos los datos que provienen de las diferentes zonas. La unidad central y las ECUs están conectados a través de una conexión Ethernet.
El concepto de arquitecturas E/E por zonas desvincula completamente las funcionalidades SW del hardware. Estas funcionalidades o componentes SW pueden ser ejecutados en servidores remotos localizados en la nube, ya sea asociadas a tareas específicas o bajo demanda. Este cambio de paradigma en las arquitecturas abre nuevas perspectivas y facilita un número de opciones virtualmente ilimitado.
Otro inconveniente que se ha planteado con toda la evolución que están sufriendo las arquitecturas es la diversidad de plataformas HW y de sistemas operativo (OS) utilizados por cada una de las ECUs. Esto ha llevado a diferentes OEMs a buscar nuevas estrategias con el fin de minimizar desarrollos, aumentar la portabilidad y reutilización del SW. Esta estrategia consiste en la creación de capas de abstracción, consiguiendo de esta forma desarrollos SW independientes tanto del HW como del OS empleado y pudiendo así conseguir plataformas estándar que pueden ser utilizadas en diferentes vehículos. Estas capas de abstracción también aportan otras ventajas como: facilitar los nuevos desarrollos ya que reduce su complejidad y tiempo de desarrollo e integración, reducir el tiempo dedicado al mantenimiento y a la corrección de errores. Algunos ejemplos los tenemos en Mercedes con MB.OS, un sistema operativo basado en datos y actualizable de forma sencilla que establecerá la conexión del automóvil con la nube, o Volkswagen con VW.OS que será más sencillo e intuitivo y facilitará en gran medida las actualizaciones remotas.
El mundo de la automoción está en una evolución y desarrollo continuo y el conjunto de retos promete ir en aumento en los próximos años. El hasta hace muy poco presidente de Volkswagen, Herbert Diess, estimaba que "el software representará el 90% de las futuras innovaciones en el automóvil". Según palabras de Zoran Filipi, presidente del Departamento de Ingeniería Automotriz del Centro Internacional de Investigación Automotriz de la Universidad de Clemson, "Ninguna otra industria está experimentando un cambio tecnológico tan rápido como la industria automotriz" y el software está desempeñando un rol fundamental en esta revolución.
Desde hace ya más de 18 años, GMV ha estado trabajando con diferentes OEMs y suministradores Tier-1 y desarrollando una sólida experiencia en ingeniería de software para automoción, llevando a cabo desarrollos conforme a los más exigentes estándares requeridos en el software automotriz (como Automotive SPICE CL3) y trabajando sobre diferentes plataformas y Sistemas Operativos, lo que nos permite ser parte del coche del presente y del coche del futuro.
Autor: Beatriz García Navarro