Finaliza el proyecto de robótica europeo PRO-ACT
A finales de abril y después de 27 meses de intenso trabajo (14 de ellos con condiciones COVID y sus correspondientes limitaciones) el proyecto PRO-ACT llegó a su fin.
Iniciado en 2019, PRO-ACT fue uno de los 5 proyectos seleccionados para ser financiados por la Comisión Europea en la segunda fase del Strategic Research Cluster (SRC), en robótica espacial, dentro del programa europeo H2020. Con su larga experiencia en el campo de la robótica espacial, GMV ha tenido una participación destacada en este proyecto, liderado por SpaceApps y desarrollado por un consorcio formado por 10 socios.
PRO-ACT tiene como principal objetivo desarrollar y validar aplicaciones para facilitar y dar soporte a la preparación de futuras misiones tripuladas a otros planetas. Para conseguir éste ambicioso objetivo, los robots deben ser capaces de operar coordinadamente de forma autónoma en equipo para realizar tareas complejas, como colaborativamente mapear y preparar el terreno de la futura base o cooperativamente construir infraestructuras para el asentamiento humano. Otro objetivo de PRO-ACT era abordar el problema del establecimiento de un precursor de base lunar mediante el ensamblaje de un sistema de extracción y utilización de recursos in situ (ISRU) con ayuda de robots móviles actuando cooperativamente; unas capacidades que son esenciales para el establecimiento de futuros asentamientos humanos.
En el marco de este proyecto se han utilizado todos los bloques comunes (OG1-5) desarrollados durante la primera fase del programa (Building Blocks), haciendo especial mención a ERGO (controlador autónomo orientado a implementar y ejecutar objetivos de alto nivel) y ESROCOS (entorno de desarrollo de software para aplicaciones de control robótico); ambos liderados por GMV en la primera fase del clúster.
Asimismo, GMV ha liderado la definición, diseño e implementación de la arquitectura multirobot relacionada con la planificación, ejecución-coordinada y monitorización; participado en el desarrollo de otros sistemas de soporte (comunicaciones, centro de control y monitorización en tierra); en la integración de los bloques comunes desarrollados durante la primera fase; y en actividades de prueba, demostración y difusión de los resultados obtenidos.
Debido a las normativas sanitarias y restricciones de viaje por toda Europa, la demonstración final de las soluciones desarrollas en el marco de este proyecto se han realizado en su mayor parte de manera remota, ajustando cada uno de los escenarios inicialmente previstos de demostración a dos áreas de test diferentes:la Sala Lunar Interior de DFKI (Alemania) dónde estaba el robot “Mantis” y en PIAP-Space (Polonia) donde estaba el robot “Veles”.
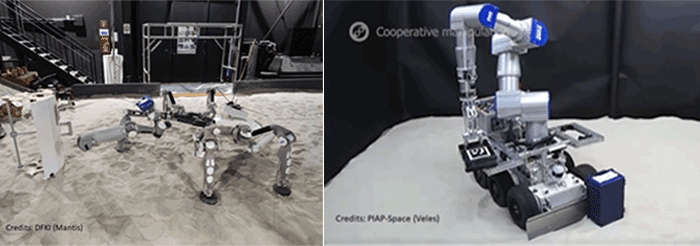
Tras establecer y configurar una red virtual (VPN, Virtual Private Network) entre ambas localizaciones y los diferentes socios, el software fue remotamente instalado y configurado en ambos robots con el fin de validar y demostrar el correcto envío, planificación y ejecución de «cooperative goals» remotamente comandados desde una estación multirobot de control ejecutándose desde GMV en España. Durante los test remotos los robots Mantis y Veles simultáneamente de forma autónoma exploraron su terreno análogo lunar cartografiando el entorno de forma cooperativa, y simularon tareas cooperativas de manipulación y transporte de objetos apoyados por estaciones de control multi-robot de GMV (España) y Space Applications Services (Bélgica), validando así satisfactoriamente el «Cooperative and multi-robot framework» desarrollado durante éste proyecto.
Tras estas pruebas, el día 26 de mayo tuvo lugar, de manera también remota, la aceptación final del proyecto, un hito en el que estuvieron presentes miembros de la Comisión Europea (CE) y la Agencia Espacial Europea (ESA) junto con el resto del consorcio de socios de PRO-ACT. Tras mostrar los resultados obtenidos (presentaciones, videos y fotos) de los tests de demonstración ejecutados a finales de Mayo y los resultados finales del proyecto, tanto la CE como la ESA, felicitaron al consorcio por los resultados obtenidos en éste ambicioso proyecto, agradeciendo el gran trabajo realizado técnicamente y resaltando la extra coordinación, adaptación y colaboración de todo el consorcio debido al COVID.