With LUPIN, GMV marks a new era in automated lunar exploration
GMV has presented the latest results for the project known as LUPIN (Enabling High-Performance PNT in the Lunar Environment), after carrying out field testing from April 27th to May 8th in the municipality of La Oliva, on the Spanish island of Fuerteventura. This is an innovative initiative of the European Space Agency (ESA), which has the aim of developing a prototype navigation system to simulate the signals that lunar surface rovers are expected to receive in the future. The result will be a navigation system similar to GPS, but for use on the surface of the Moon. This will provide a navigation tool similar to Google Maps for users such as rovers and astronauts.
In a context of renewed interest in lunar exploration, the development of advanced technologies to support rovers, landers, and even the presence of humans on the surface of the Moon has become a strategic priority for the space industry. In view of this, the ESA is now carrying out this groundbreaking project as part of its Navigation Innovation and Support Program (NAVISP). The aim is to test new positioning, navigation, and timing (PNT) technologies that will be able to support exploration of the lunar surface and other applications. These technologies will combine current approaches to planetary PNT with distance measurement signals from the future Lunar Communication Navigation System (LCNS). These are satellite signals that will be used in the same way as GPS signals are used on Earth, although in this case the satellites will be in orbit around the Moon. This system will also be adapted to particular areas of interest (for example, the lunar south pole, the far side of the moon, and permanently shadowed regions).
Existing lunar navigation capabilities are subject to some significant limitations. Unlike the Earth, the Moon does not have a positioning satellite infrastructure like the Global Positioning System (GPS). This means that spacecraft and rovers are unable to determine their precise location in real time. Instead, they have to rely upon internal calculations and data sent from Earth. To overcome these restrictions, GMV has developed the LUPIN lunar navigation prototype for the ESA. Over the course of the next decade, this technology will revolutionize the way in which astronauts and vehicles operate on the surface of the Moon. LUPIN will reduce the current dependency on onboard systems that use complex algorithms to determine relative locations, and this will optimize the performance and efficiency of lunar surface exploration vehicles.
This advancement will not only improve precision, it will also allow determination of faster and more efficient routes, while reducing the computational load that must now be dedicated to navigation. As a result, only the conditions of the lunar surface will limit the speeds that rovers can travel, rather than technical limitations, and this will mark the beginning of a new era in automated lunar exploration.
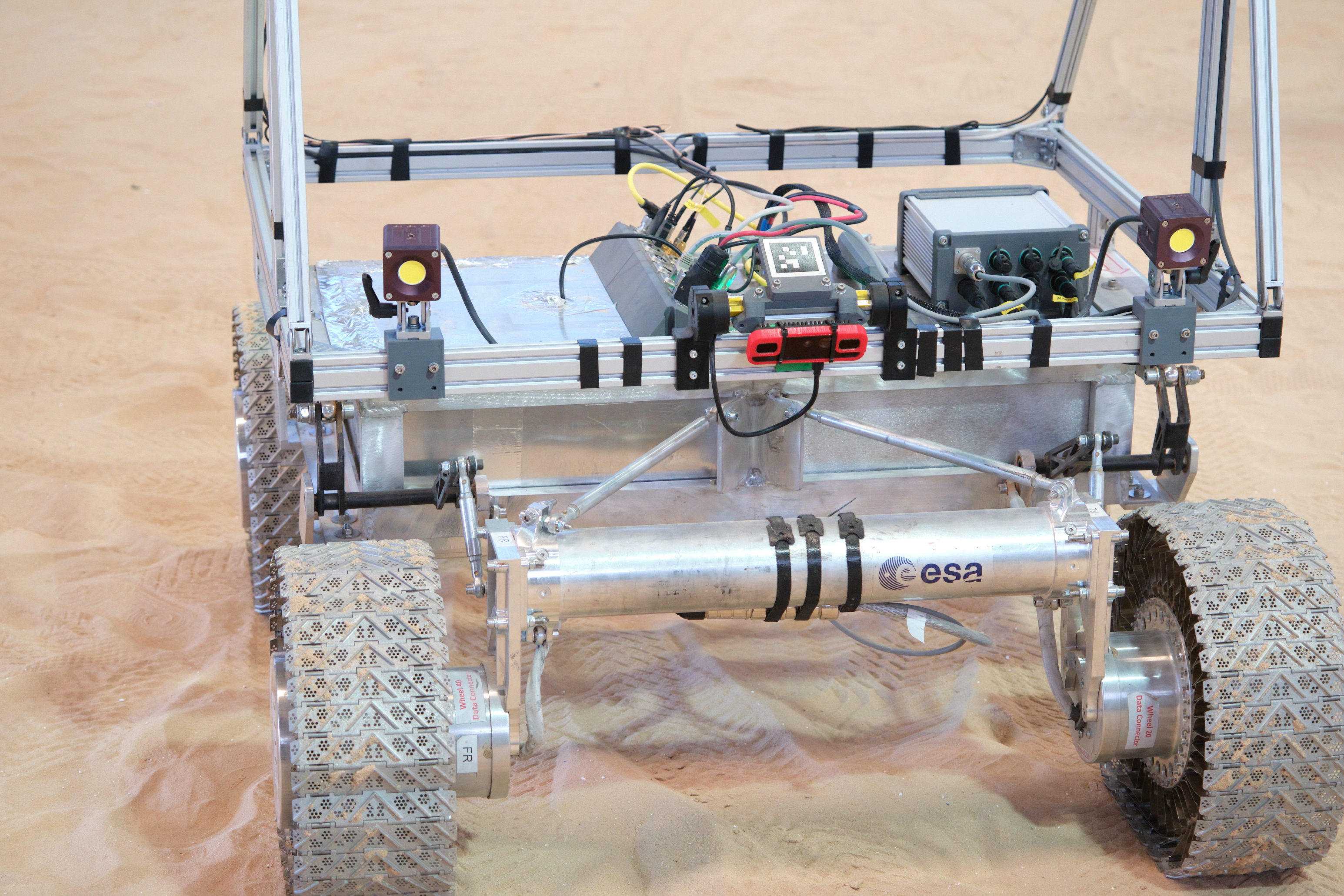
During the testing campaign carried out on the Spanish island of Fuerteventura, the real-time navigation system was successfully verified and validated. This was done via a series of tests that simulated the conditions of the LCNS positioning and precise location signals that will be received in the future by lunar surface rovers.
The presentation ceremony, which was held on May 8th at the wrestling arena in the town of Lajares, was attended by the Mayor of the municipality of La Oliva, Isaí Blanco; the island of Fuerteventura’s Minister of Innovation, Rayco León; GMV’s Manager of Strategy and Business Development for Science, Exploration and Transportation, Mariella Graziano; GMV’s head of the LUPIN project, Steven Kay; and the rest of the GMV team.
