Erfolgreicher Abschluss der Prüfung von EROSS+ auf der platform-art©
Anfang Dezember wurden die Tests des europäischen Forschungs- und Entwicklungsprojekts EROSS+ im Labor der Plattform für fortschrittliche Robotik platform-art© von GMV an seinem Hauptsitz im Technologiepark von Madrid (Spanien) erfolgreich abgeschlossen.
EROSS+ (European Robotic Orbital Support Services +) ist Teil der dritten Phase des PERASPERA-Projekts (Plan European Roadmap and Activities for SPace Exploitation of Robotics and Autonomy). EROSS+ verfolgt das Ziel, eine Demonstrationsmission für Rendezvous und Wartung in der Umlaufbahn für zukünftige kommerzielle europäische Robotermissionen zu entwickeln. Im Rahmen dieses Projekts wird eine Lösung für Satelliten zur Bereitstellung von LEO- und GEO-Diensten entwickelt, bei der fortschrittliche Robotertechnologien zum Einsatz kommen, die mit Unterstützung der Europäischen Kommission, der ESA und anderer europäischer Einrichtungen entwickelt wurden. Die Aufgabe der Mission besteht darin, die Fähigkeit zur Durchführung von Wartungsarbeiten in der Umlaufbahn für künftige Missionen zu validieren, einschließlich des Einfangens, der Arbeiten selbst (Betanken, Austausch und Reparatur von Nutzlasten) sowie Montagearbeiten in der Umlaufbahn.
GMV ist Teil eines Konsortiums aus sechs Partnern unter der Leitung von Thales Alenia Space France. Die GMV-Aktivitäten in diesem Projekt konzentrieren sich auf drei Bereiche: die Entwicklung der GNC-Funktionen (Guidance, Navigation, and Control) zur Generierung der während des orbitalen Rendezvous zu verfolgenden Referenztrajektorien, die Entwicklung der Bildverarbeitungsfunktion, die die notwendigen Messungen für die GNC-Navigation zur Bestimmung der relativen Position und Lage in Bezug auf den Satelliten bereitstellt, sowie die Entwicklung der RSM-Funktion, die für die Steuerung und Überwachung der Roboteroperationen während der Einfang- und Wartungsarbeiten im Orbit zuständig ist.
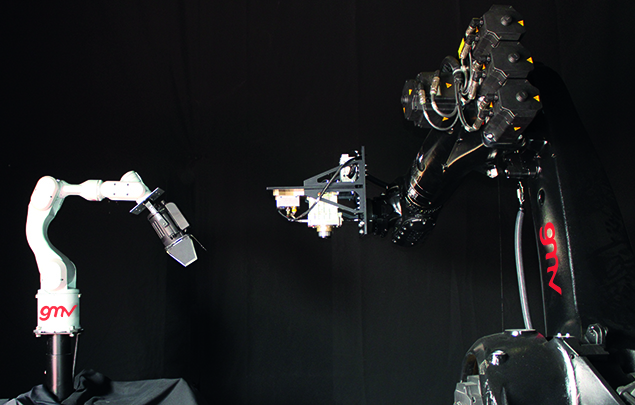
Im Rahmen der auf der platform-art© durchgeführten Tests hat GMV die Integration und Demonstration der verschiedenen Software-Elemente unterstützt, die an den Rendezvous-Operationen im Weltraum beteiligt sind, mit dem Ziel, in einer repräsentativen Umgebung die wichtigsten Funktionalitäten der orbitalen Rendezvous-Phase zu validieren, um Service-Operationen im Orbit zu ermöglichen.
Das Konsortium hat sich für diese Testphase für das GMV-Roboterlabor entschieden, weil es in der Lage ist, die CNG-Technologien für Raumfahrzeuge, die zugehörigen Messgeräte und Sensoren in einer dynamischen Umgebung in Echtzeit zu validieren, und weil es die Möglichkeit bietet, Closed-Loop-Tests unter repräsentativen Flugbedingungen durchzuführen, wodurch sich der TRL (Technology Readiness Level) der an den Tests beteiligten Elemente erhöhen lässt.
Das Projekt EROSS+ wird im Rahmen des Forschungs- und Innovationsprogramms H2020 der Europäischen Union entwickelt (Finanzhilfevereinbarung Nr. 101004346).
Mehr über GMV im SRC für Weltraumrobotik-Technologien
Der Strategische Forschungscluster (SRC) für Weltraumrobotik-Technologien wird vom Projekt PERASPERA koordiniert und von der Europäischen Kommission im Rahmen der Programmunterstützung (PSA) finanziert. Das PERASPERA-Projekt wird von der Europäischen Union im Rahmen des Horizon 2020 Space Programms "COMPET-4-2014 Space Robotics Technologies" finanziert (Finanzhilfevereinbarung Nr. 640026).
Die Ziele des SRC sind der Entwurf, die Entwicklung und die Erprobung von Weltraumrobotertechnologien, die für künftige Wartungsarbeiten in der Umlaufbahn sowie für Weltraumerkundungs- und -erschließungsmissionen benötigt werden, um die Betriebsdauer von Satelliten zu verlängern und ihre Effizienz bei Weltraummissionen zu verbessern.
GMV hat in der gesamten Entwicklung der Arbeit des SRC eine wichtige Rolle gespielt. In der ersten Phase hat das Unternehmen drei der sechs Projekte koordiniert: ESROCOS (OG1), ERGO (OG2) und FACILITATORS (OG6). Bei der zweiten Ausschreibung war GMV an allen Projekten beteiligt: Das Unternehmen übernahm die Koordinierung von ADE (L 10) und beteiligte sich außerdem an den Projekten EROSS (L 7), MOSAR (L 9) und PROACT (L 11). Im Rahmen der dritten Ausschreibung war GMV an EROSS+ (OG12), PERIOD (OG13) und COROB-X (OG14) beteiligt. In der jüngsten Ausschreibung schließlich ist GMV an EROSS IOD (European Robotic Orbital Support Services In Orbit Demonstrator) beteiligt, dem einzigen Projekt dieser Phase, das im Jahr 2026 die erste europäische Demonstrationsmission zur Unterstützung von Robotersatelliten in der Umlaufbahn und zum Austausch ihrer Nutzlasten in die Tat umsetzen wird.
GMV kann außerdem eine herausragende Erfolgsbilanz bei den Aktivitäten des Technologieforschungsprogramms (TRP) der ESA vorweisen und ist in Europa führend bei den Robotertechnologien in den Bereichen Bordautonomie und GNC für Anwendungen in der Umlaufbahn und auf der Oberfläche.