El nou rol dels sistemes GNSS segurs i d’alta precisió en el mercat d’automoció
Els sistemes globals de navegació per satèl·lit (GNSS en anglès), especialment el nord-americà GPS i l’europeu Galileo, conformen una tecnologia que està completament integrada a les nostres activitats del dia a dia. La trobem als nostres vehicles, telèfons mòbils, portables i dispositius en general, i tenim completament assimilat conèixer la nostra ubicació en cada moment i lloc.
Un dels usos més estesos de GNSS és per a la navegació porta a porta. Reconec que l’autor que subscriu aquest text de vegades s’empipa quan adverteix que, als carrers, als programes de TV, informatius, diaris, etc. es diu contínuament “GPS” a les aplicacions de navegació. La realitat és que el terme GPS (que ni tan sols és prou rigorós, ja que s’hauria d’utilitzar GNSS, ja que hi ha altres sistemes com Galileo, BeiDou, Glonass, etc.) és la tecnologia que permet al dispositiu conèixer la seva posició, velocitat i curs actuals. Com navegar pels carrers i carreteres fins a arribar a l’adreça de destinació és conseqüència dels mapes i els algoritmes de càlcul de camins que es troben dins dels dispositius o aplicacions de navegació, no de la posició GNSS (si bé sense una no podria existir l’altre).
Segurament influïts per aquesta sinècdoque, i ja abordant el tema del mercat d’automoció que ens ocupa, hi ha encara en aquest una visió tradicional que associa els sistemes GNSS a l’àrea multimèdia dels vehicles (on habitualment s’inclouen els sistemes de navegació). Per a aquestes aplicacions clàssiques dels sistemes GNSS (on també es poden enquadrar els sistemes de trucades d’emergència) n’hi ha prou amb el GNSS per si sol, que pot assolir precisions entorn de 5-10 m per a monofreqüència o 3-5 m per a multifreqüència. Especialment tenint en compte que aquesta precisió pot fins i tot millorar-se a 1-3 m per mitjà de sistemes d’augmentació com DGNSS o SBAS.
Tanmateix, aquests nivells de precisió, per bons que siguin, no són suficient per cobrir els requisits més exigents de les aplicacions emergents en el camp dels sistemes cooperatius o la conducció autònoma. En aquest món, els sistemes utilitzats necessiten incrementar progressivament la disponibilitat de la funció de localització global i els nivells esmentats de precisió. Aquí és on els sistemes GNSS d’alta precisió (PPP, RTK, PPP-RTK) apareixen, ja que amb ells podem obtenir una precisió de nivell centrimètric, la qual cosa, complementat amb altres sensors locals com ara radar, càmeres o LiDAR, compleix el rol de posicionar el vehicle d’una manera precisa.
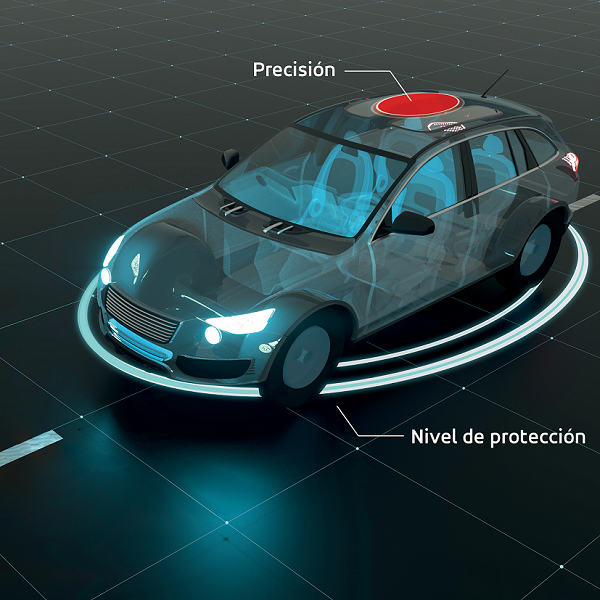
En qualsevol cas, en aquelles aplicacions en què el concepte de safety és clau, com és el cas de la conducció autònoma, els nostres sistemes han d’anar més enllà de la precisió. De poc serveix tenir posicions precises si no tenim manera de saber si la posició que entrem com a entrada a un sistema safety és errònia. El valor afegit d’aquests sistemes de posicionament segur és que proporcionen una posició “segura”, la qual cosa significa una posició precisa i confiable. Per a això, aquests sistemes implementen el concepte d’integritat associat a la posició, gràcies a la detecció i exclusió, en temps real i durant el càlcul de la posició, de les fonts d’error que l’afecten. Gràcies a això som capaços de calcular una àrea de confiança, coneguda com protection level. La probabilitat que la posició real (posició calculada menys l’error) es trobi fora de l’àrea de confiança que envolta la posició calculada és extremadament baixa, i per sota de la probabilitat objectiu (coneguda com Target Integrity Risk o TIR). Com menor sigui el TIR objectiu, més gran serà el protection level, ja que hi haurà més consideracions per tenir en compte a l’hora de delimitar l’error.
A més de l’àrea de confiança o protection level, el compliment amb estàndards com ara ISO 26262 o ISO 21448 (SOTIF) en el desenvolupament dels esmentats sistemes i el concepte d’integritat permeten al sistema assolir un nivell d’ASIL (Automotive Safety Integrity Level) adequat i integrar el component GNSS amb altres subsistemes ASIL, amb l’objectiu de contribuir al safety case del vehicle.
En qualsevol cas, i tal com ja hem avançat, GNSS té sentit en conducció autònoma quan, a més, es combina amb altres sensors. Per si sol, GNSS no pot utilitzar-se per guiar un vehicle autònom (fins i tot sense tenir en compte els elements externs com ara obstacles, altres vehicles, etc.), ja que, com sabem, el sistema té les seves limitacions especialment en àrees amb escassa visibilitat del cel com poden ser entorns urbans o túnels. En aquests casos, la integració amb la informació que prové d’altres sensors com ara inercials, odòmetres, etc. permeten continuar amb la funció de localització per mitjà d’una projecció de l’última posició GNSS coneguda durant un breu període de temps. Si a més pensem com funcionen els cotxes autònoms, veurem que hi ha altres sensors a bord nombrosos, com ara càmeres, radars i LiDAR que implementen el rol de l’ull humà i conformen el sistema de percepció del vehicle. Juntament amb la intel·ligència artificial, la percepció proporciona al vehicle el coneixement del seu entorn i obstacles, tant estàtics com dinàmics, esperats i inesperats. Junts el sistema de percepció, la IA i el sistema de posicionament global que a més proporciona velocitat i rumb del vehicle conformen els components ADAS crucials de la conducció autònoma.
En aquest conjunt, la solució GNSS d’alta precisió i segura presenta independència, arquitecturalment parlant, respecte dels sensors de percepció i els mapes. D’acord amb l’ISO 26262-9 sobre functional safety, la combinació de subsistemes independents amb un nivell més baix d’ASIL (ASIL-B), a través d’implementar redundància, pot assolir un nivell ASIL més alt (per exemple, ASIL-D). Com a resultat, utilitzant un sistema GNSS segur, que pot assolir nivells ASIL-B, com una peça addicional del safety case del vehicle, l’OEM pot assolir els nivells més alts d’ASIL requerits. Això cobra especial importància si a més considerem que GNSS és un sensor amb un cost contingut i que pot treballar en entorns molt diversos sota tota mena de condicions climàtiques, incloent aquelles situacions sense referències visuals que sí que afecten altres sistemes ADAS, com poden ser deserts, calçades cobertes de neu, etc.

A més de la seva contribució al safety case, el sistema GNSS també pot utilitzar-se per inicialitzar i calibrar altres sensors de percepció, i donar suport a un ús més eficient dels recursos de la plataforma. També suposa una font fiable per a l’actualització dinàmica de mapes HD (per exemple, per mitjà de tècniques SLAM o d’altres). Així mateix, la combinació d’una posició precisa juntament amb protection level que hem comentat abans pot ser clau per determinar de manera unívoca els esdeveniments d’entrada o sortida dins una àrea geogràfica determinada (geofencing). Això és particularment rellevant en conducció autònoma per assegurar-se que el vehicle ha accedit a certa infraestructura (per exemple, una autovia) on es permet un nivell d’automatització superior. En resum, el nombre d’aplicacions per a una posició precisa i confiable augmenta per moments.
La majoria dels OEM han començat ja a descobrir els beneficis que solucions com ara Point Safe® for automotive, subministrada per u-blox i que integra el producte GMV GSharp® for Automotive, poden proporcionar a tots els casos d’ús que hem comentat en aquest text. De moment, aquesta tecnologia s’està introduint a poc a poc en models específics, de manera anàloga a altres funcions de conducció autònoma, però es preveu que el mercat per a aquest tipus de solucions creixi considerablement en els propers anys.
Per tant, als sistemes GNSS encara els queda un llarg camí per davant en automoció.
Autor: Carlos Busnadiego Gutiérrez