El programari, la clau del vehicle del futur

El món de l’automoció està en continu canvi i durant els últims anys s’està focalitzant principalment en els vehicles connectats i autònoms.
Els vehicles estan experimentant una gran evolució i cada dia ofereixen noves funcionalitats, tenen més complexitat i requereixen més mesures de seguretat. Tot això s’aconsegueix a través de la inclusió de nous serveis i funcionalitats SW. Ja alguns estudis han constatat que en l’última dècada s’ha multiplicat per més de 10 les línies de codi presents en els vehicules.
El programari està assumint cada vegada més tasques importants al cotxe, cosa que facilita l’intercanvi de dades amb altres usuaris de la carretera i amb la infraestructura, l’actualització dels vehicles des del núvol i, de manera progressiva, l’arribada de la conducció autònoma.
Aquest protagonisme cada vegada més gran que està adquirint el programari al vehicle, amb l’increment del nombre de línies de codi i de la complexitat associada a les diferents funcions del vehicle fa que es requereixi una potència més gran de càlcul i integració.
Aquesta evolució dels desenvolupaments SW està ocasionant que també es produeixi una evolució i transformació en l’arquitectura elèctrica i electrònica dels vehicles.
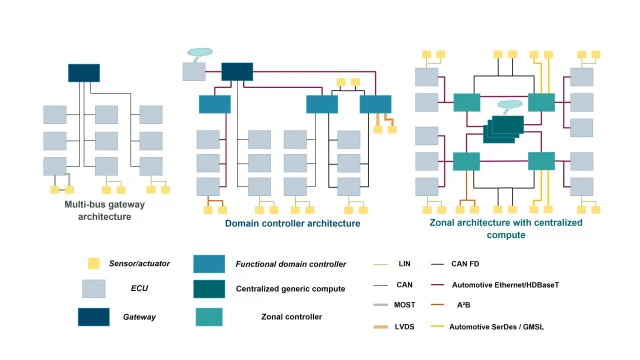
Aquesta va començar sent una arquitectura distribuïda, en la qual es disposava d’una ECU (Electronic Control Unit) per a cada servei o funcionalitat, que s’instal·lava al vehicle i s’interconnectava amb altres ECU si calia, tot i que en la majoria de les situacions la interacció entre elles era escassa. Cadascuna d’aquestes ECU estava formada pel seu propi HW i SW, amb una arquitectura, en la majoria dels casos, totalment diferent i customitzada per a les diferents plataformes disponibles. Això ja no només implicava una gran complexitat i dificultat a l’hora de mantenir i resoldre problemes als vehicles, sinó que també provocava una gran dificultat a l’hora de reutilitzar molts desenvolupaments SW entre diferents vehicles o fabricants.
Veient que aquesta complexitat tendiria a ser cada vegada més gran, es va començar a dur a terme l’estudi d’arquitectures alternatives, que han anat definint l’evolució arquitectònica de l’automòbil. El primer pas va ser crear xarxes específiques amb aquelles ECU que necessitaven comunicar-se entre si o que es trobaven dins de funcionalitats específiques, i constituïen el que es coneix com una arquitectura centralitzada de dominis. Les ECU de Domini es connecten a les diferents ECU funcionals mitjançant el bus CAN i una connexió Ethernet. Aquesta arquitectura suporta funcions més complexes, té més flexibilitat i una xarxa de comunicacions de més velocitat.
De cara al futur s’està treballant en la definició d’arquitectures per zones, que pot solucionar els problemes de l’arquitectura de domini en agrupar ECU que es troben físicament a prop sota un sol controlador de zona. Aquesta unitat actua com a mestre per processar totes les dades que provenen de les diferents zones. La unitat central i les ECU estan connectades a través d’una connexió Ethernet.
El concepte d’arquitectures E/E per zones desvincula completament les funcionalitats SW del maquinari. Aquestes funcionalitats o components SW poden ser executats en servidors remots localitzats en núvol, ja sigui associades a tasques específiques o sota demanda. Aquest canvi de paradigma en les arquitectures obre noves perspectives i facilita un nombre d’opcions virtualment il·limitat.
Un altre inconvenient que s’ha plantejat amb tota l’evolució que estan tenint les arquitectures és la diversitat de plataformes HW i de sistemes operatius (OS) utilitzats per cadascuna de les ECU. Això ha portat a diferents OEM a cercar noves estratègies a fi de minimitzar desenvolupaments, augmentar la portabilitat i reutilització de l’SW. Aquesta estratègia consisteix en la creació de capes d’abstracció, s’aconsegueixen d’aquesta manera desenvolupaments SW independents tant del HW com de l’OS emprat i així aconseguir plataformes estàndard que poden ser utilitzades en diferents vehicles. Aquestes capes d’abstracció també aporten altres avantatges com ara: facilitar els nous desenvolupaments, ja que en redueix la complexitat i temps de desenvolupament i integració, reduir el temps dedicat al manteniment i a la correcció d’errors. Alguns exemples els tenim en Mercedes amb MB.OS, un sistema operatiu basat en dades i actualitzable de manera senzilla que establirà la connexió de l’automòbil amb el núvol, o Volkswagen, amb VW.OS, que serà més senzill i intuïtiu i facilitarà en gran manera les actualitzacions remotes.
El món de l’automoció està en una evolució i desenvolupament continus i el conjunt de reptes promet anar en augment en els propers anys. El fins no fa gaire president de Volkswagen, Herbert Diess, estimava que "el programari representarà el 90 % de les futures innovacions a l’automòbil". Segons paraules de Zoran Filipi, president del Departament d’Enginyeria Automotriu del Centre Internacional de Recerca Automotriu de la Universitat de Clemson, "cap altra indústria no està experimentant un canvi tecnològic tan ràpid com la indústria automotriu" i el programari està exercint un rol fonamental en aquesta revolució.
Des de fa ja més de 18 anys, GMV ha estat treballant amb diferents OEM i subministradors Tier-1 i desenvolupant una sòlida experiència en enginyeria de programari per a automoció, duent a terme desenvolupaments conforme als més exigents estàndards requerits en el programari automotriu (com Automotive SPICE CL3) i treballant sobre diferents plataformes i sistemes operatius, que ens permet ser part del cotxe del present i del cotxe del futur.
Autor: Beatriz García Navarro