GMV Flexplan®
A Real General Planning and Scheduling System





Flexplan® is a highly configurable system that can be reused efficiently from one mission to another for mission planning and execution. It covers the entire mission planning cycle and enables users to adapt the system to their needs quickly and easily.
The Flexplan® design enables it to be used by non-expert individuals, in addition to adapting it easily to any spacecraft platform and a wide variety of missions.

Some of its features include:
- Soft algorithm generation: the tool does not need to be recompiled when the flight rules change.
- High-fidelity mission scenarios: creation of events and tasks based on user scenarios.
- User-oriented design: no programming knowledge is needed to use the tool.
- Modular architecture: facilitates easy integration into different ground architecture concepts.
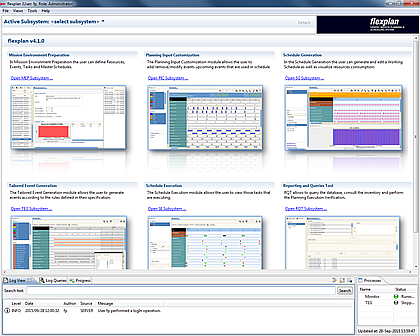
During the mission configuration phase, a user will generally interact with the MEP offline. The daily mission planning cycle includes the PIC and the SG/conflict resolution (CR) components. Users begin interacting with the PIC by importing the external events (flight dynamics, user requests, etc.). The mission schedule is then generated, selecting any conflict and exporting the conflict-free schedule to the control center for mission execution. The external interface module provides connectivity between Flexplan® and other ground subsystems. Flexplan® also supports services based on the simple object access protocol (SOAP), as well as guidelines that can run schedules or retrieve schedule information.